5.3.3 Double Pendulum Chaos
Simulate two coupled pendulums with Runge-Kutta integration, then watch deterministic physics produce motion that never repeats and never can be predicted long-term.
Overview
A single pendulum is the textbook example of predictable physics — it swings back and forth on a sinusoid forever. Hang a second pendulum from its end and the system becomes one of the simplest known examples of deterministic chaos: the equations of motion are fully written down, the simulation is exact, and yet two near-identical starting positions produce wildly different trajectories within seconds. Edward Lorenz discovered this property in atmospheric models in 1963 and named the popular shorthand the “butterfly effect” [1]. In this lesson you will derive the equations from coupling, integrate them with the Runge-Kutta 4th-order (RK4) method, animate the swinging arm, and visually demonstrate sensitivity to initial conditions by running two simulations whose starting angles differ by 0.06 degrees.
Learning objectives
- Read the double-pendulum equations of motion and identify the coupling terms that make them chaotic.
- Implement RK4 numerical integration and understand why Euler is not enough here.
- Define chaos as extreme sensitivity to initial conditions — not randomness.
- Visualise chaos by comparing trajectories from very nearly identical starting states.
Quick start — see it in action
Run the script. It writes three files: a GIF of the swinging arm, a still frame, and a comparison plot of two near-identical pendulums diverging.
python double_pendulum.py
Core concepts
Concept 1 — Coupled physics, simple in shape
A double pendulum is two rigid rods connected end-to-end. The first rod hangs from a fixed pivot; the second hangs from the end of the first. Each rod has a length (L1, L2), a mass concentrated at its tip (m1, m2), and an angle from vertical (theta1, theta2). The system has four state variables — those two angles and their angular velocities omega1, omega2.
The motion of each rod affects the other. When the first swings, it carries the second with it. When the second swings, its momentum yanks back on the first. That mutual influence — the coupling — is the engine of the chaos.
The equations of motion come from Lagrangian mechanics [2]. They look heavy, but the essential point is just: the acceleration of each rod depends on both angles and both angular velocities.
def compute_accelerations(theta1, omega1, theta2, omega2):
delta = theta1 - theta2
denom = 2 * m1 + m2 - m2 * np.cos(2 * delta)
alpha1 = (
-g * (2 * m1 + m2) * np.sin(theta1)
- m2 * g * np.sin(theta1 - 2 * theta2)
- 2 * np.sin(delta) * m2 * (
omega2**2 * L2 + omega1**2 * L1 * np.cos(delta)
)
) / (L1 * denom)
alpha2 = (
2 * np.sin(delta) * (
omega1**2 * L1 * (m1 + m2)
+ g * (m1 + m2) * np.cos(theta1)
+ omega2**2 * L2 * m2 * np.cos(delta)
)
) / (L2 * denom)
return alpha1, alpha2Concept 2 — Chaos is determinism plus sensitivity
Chaos does not mean randomness. Every step of the double pendulum’s motion is exactly determined by its previous step. Given identical initial conditions and infinite precision, the trajectory is repeatable. The unpredictability comes from a different property: extreme sensitivity to initial conditions.
Start two pendulums with angles differing by 0.001 radians (about 0.06 degrees, narrower than the width of a pencil line at arm’s length). For the first three seconds they trace the same path. By five seconds you can see them parting. By fifteen seconds they are unrelated.
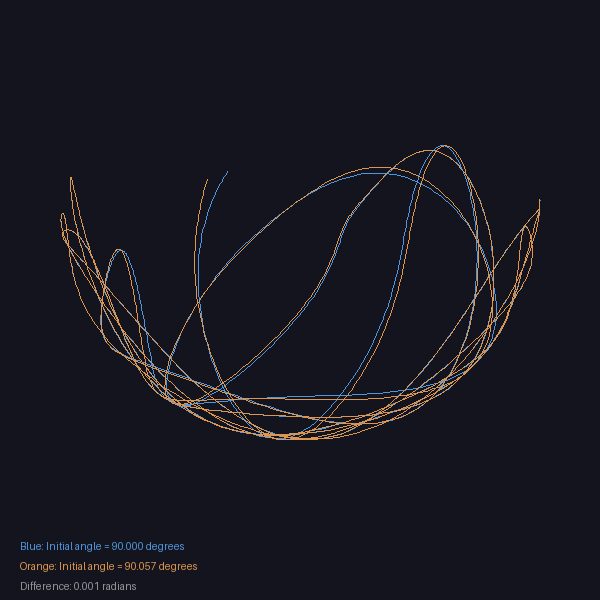
The rate at which nearby trajectories pull apart is called the Lyapunov exponent [3]. A positive exponent means exponential divergence — small errors double, then double again, then again. The double pendulum has measurable positive Lyapunov exponents, which is the formal statement that “it is chaotic” [4].
Concept 3 — Why RK4 instead of Euler
The simplest integrator — Euler’s method — updates the state with new = old + derivative * dt. In Module 5.1.1 (sand) that was plenty accurate, because each particle was independent and short-lived. For the double pendulum it is a disaster: Euler accumulates ~dt² of error per step, those errors look like extra perturbations to the initial condition, and chaotic systems amplify perturbations exponentially. Within a few seconds Euler diverges from the “true” trajectory of the same starting state.
The Runge-Kutta 4th-order method (RK4) samples the derivative four times per step at carefully-chosen interior points and combines them with a weighted average. The error per step is now ~dt⁵ — many orders of magnitude smaller [5].
def rk4_step(theta1, omega1, theta2, omega2, dt):
def f(th1, w1, th2, w2):
a1, a2 = compute_accelerations(th1, w1, th2, w2)
return w1, a1, w2, a2
k1 = f(theta1, omega1, theta2, omega2)
k2 = f(theta1 + k1[0]*dt/2, omega1 + k1[1]*dt/2,
theta2 + k1[2]*dt/2, omega2 + k1[3]*dt/2)
k3 = f(theta1 + k2[0]*dt/2, omega1 + k2[1]*dt/2,
theta2 + k2[2]*dt/2, omega2 + k2[3]*dt/2)
k4 = f(theta1 + k3[0]*dt, omega1 + k3[1]*dt,
theta2 + k3[2]*dt, omega2 + k3[3]*dt)
weighted = lambda i: (k1[i] + 2*k2[i] + 2*k3[i] + k4[i]) * dt / 6
return (theta1 + weighted(0), omega1 + weighted(1),
theta2 + weighted(2), omega2 + weighted(3))Exercises
Three exercises in Execute → Modify → Create order: run the canonical chaos demo, retune physics parameters, then implement the integrator from scratch.
Run the canonical demo
Download double_pendulum.py and run it. It produces double_pendulum.gif, double_pendulum_frame.png, and chaos_comparison.png.
Reflection questions
- Watch the GIF several times. Does the motion ever exactly repeat?
- In
chaos_comparison.png, at what wall-clock second do the two trajectories visibly diverge? - Which terms in
compute_accelerationsare the coupling — the ones that make alpha1 depend on theta2 and vice versa? - Why does this make weather forecasting hard?
Answers
Exact repetition? — Almost certainly not. The system is non-periodic: the state never returns exactly to a previous configuration. It may come close, but every “near return” amplifies tiny differences and the subsequent trajectory diverges.
Visible divergence — Typically around 3–5 seconds the trajectories begin to part. By 7–8 seconds the difference is unmistakable; by 15 seconds the two pendulums look like independent simulations.
Coupling terms — Every appearance of delta = theta1 - theta2 is a coupling term: np.cos(2 * delta) in the denominator, np.sin(delta) in both numerators, plus the np.sin(theta1 - 2 * theta2) term in alpha1. If you delete those, alpha1 stops depending on theta2 and the system de-couples.
Weather forecasting — Atmospheric dynamics are governed by nonlinear PDEs with the same sensitivity property. Every observation has measurement error; the model amplifies that error exponentially. The current practical horizon for skillful forecasting is around 10–14 days, and it is bounded by chaos, not by computational power.
Retune the physics
Edit the constants at the top of double_pendulum.py and re-render. Each goal isolates one physical parameter.
Goals
- Different initial angles:
theta1_init = np.pi / 4,theta2_init = np.pi. - Asymmetric lengths:
L1 = 1.5,L2 = 0.5. - Asymmetric masses:
m1 = 2.0,m2 = 0.5.
Goal 1 — what to expect
Starting theta2 at π means the lower rod points straight down — an unstable equilibrium. Any small perturbation tips it into a swing. With theta1 at 45° and theta2 at 180° you get an “S-shaped” initial release that builds into dramatic flapping motion within the first half-second.
Goal 2 — what to expect
A shorter second rod oscillates much faster than a longer one (period scales with sqrt(L)), so the second bob whirs while the first one swings slowly. The trajectory pattern becomes more compact — the second bob simply cannot reach as far from its pivot — but you see more loops per second.
Goal 3 — what to expect
A heavier first mass means its motion is less affected by the second. The first rod swings more smoothly, almost like a single pendulum, while the second bob behaves erratically (its lower inertia leaves it at the mercy of whatever the first rod is doing).
Implement RK4 from scratch
Use double_pendulum_starter.py, which provides the simulation loop, animation rendering, and figure helpers. Two functions are stubbed out with TODOs — implement them and the script will work.
Implement
compute_accelerations(theta1, omega1, theta2, omega2)— return(alpha1, alpha2)using the formulae from Concept 1.rk4_step(theta1, omega1, theta2, omega2, dt)— return the four updated state variables.
Hint 1 — Accelerations structure
The formula has three sections each:
- Compute
delta = theta1 - theta2. - Compute the shared denominator
2*m1 + m2 - m2*cos(2*delta). - Build the two numerators directly from the formulae and divide.
If a quick sanity check fails: when both pendulums start at small angles (theta1=theta2=0.1, omega1=omega2=0), the accelerations should be near -g/L * theta — the small-angle approximation of a single pendulum.
Hint 2 — RK4 pattern
The pattern is identical for every state variable: each k evaluates f at a different time-shifted state. Bundle the state into a tuple (theta1, omega1, theta2, omega2) and write a helper f(state) that returns the derivative tuple, then k2 = f(state + k1*dt/2), and so on.
Challenge — add damping
Real pendulums lose energy to air resistance and friction at the pivot. Add a damping term proportional to angular velocity:
damping = 0.05
alpha1 -= damping * omega1
alpha2 -= damping * omega2The chaotic behaviour persists, but the system loses energy and eventually relaxes to the lower equilibrium. With damping=0.1 the pendulum typically settles within 30–60 seconds of simulated time.
Make it your own
- Triple pendulum — add a third rod with its own length, mass, and angle. The equations get longer (more cross-terms) but the structure of RK4 is unchanged.
- Phase-space plot — instead of drawing the physical arm, plot
(theta1, omega1)over time. The pattern that emerges is a strange attractor — geometric evidence that even chaotic systems have hidden structure. - Many pendulums, slightly different starts — render 50 pendulums starting from angles spaced 0.0001 radians apart. The first few seconds look like one pendulum; then the bundle frays into a cloud.
Downloads
double_pendulum.py — full reference implementation double_pendulum_starter.py — Exercise 3 scaffoldSummary
Common pitfalls to avoid
- Using Euler instead of RK4. The simulation will look fine for one second and absurd by five.
- Expecting bit-exact reproducibility across machines. Different float-rounding orders are themselves tiny perturbations.
- Confusing chaos with randomness. The system has no stochastic input — the unpredictability is structural.
- Plotting only one trajectory. Chaos is invisible from a single run; you need a pair to see it.
- Forgetting units. Lengths in metres, time in seconds,
g = 9.81. Mixing pixels with metres will not crash but it will lie about the physics.
References
- [1] Lorenz, E. N. (1963). Deterministic nonperiodic flow. Journal of the Atmospheric Sciences, 20(2), 130–141. doi:10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2
- [2] Goldstein, H., Poole, C. P., & Safko, J. L. (2002). Classical Mechanics (3rd ed.). Addison-Wesley.
- [3] Strogatz, S. H. (2014). Nonlinear Dynamics and Chaos (2nd ed.). Westview Press.
- [4] Shinbrot, T., Grebogi, C., Wisdom, J., & Yorke, J. A. (1992). Chaos in a double pendulum. American Journal of Physics, 60(6), 491–499. doi:10.1119/1.16860
- [5] Press, W. H., Teukolsky, S. A., Vetterling, W. T., & Flannery, B. P. (2007). Numerical Recipes: The Art of Scientific Computing (3rd ed.), Chapter 17. Cambridge University Press.
- [6] Levien, R. B., & Tan, S. M. (1993). Double pendulum: An experiment in chaos. American Journal of Physics, 61(11), 1038–1044. doi:10.1119/1.17335
- [7] Hairer, E., Nørsett, S. P., & Wanner, G. (1993). Solving Ordinary Differential Equations I: Nonstiff Problems (2nd ed.). Springer-Verlag.