3.4.1 Convolution
Slide a 3×3 or 5×5 kernel across an image and compute a weighted sum at every pixel. The same four-line loop, with different weights, gives identity, blur, sharpen, and edge-detection in turn.
Overview
Convolution is the workhorse of image processing: slide a small matrix of weights (the kernel) across the image, compute the weighted sum of the pixels under the kernel at every position, and the output is a transformed image. The kernel’s values decide what the transformation does — equal weights give a blur, a positive centre with negative surround gives a sharpen, a sign-flipped surround gives edge detection [1]. The same operation runs the convolutional layer of a CNN, the Gaussian smoothing of every photo app, the unsharp mask of every printing pipeline. This lesson implements convolution from scratch with two nested loops, so the what-the-kernel-does intuition lives inside your hands.
Learning objectives
- Implement 2D convolution from scratch: position the kernel, multiply element-wise, sum into the output pixel.
- Read four canonical 3×3 kernels (identity, blur, sharpen, edge-detect) and predict their visual effect.
- Pad the input with
np.pad(..., mode='edge')to keep the output the same size as the input. - Clip vs normalise the output: pick the right post-processing for the kernel you used.
Quick start — blur a checkerboard
import numpy as np
from PIL import Image
SIZE = 256
TILE = 32
# Procedural checkerboard with sharp edges
rows = (np.arange(SIZE) // TILE)[:, None]
cols = (np.arange(SIZE) // TILE)[None, :]
canvas = np.where((rows + cols) % 2 == 0, 255.0, 0.0)
K = 5
blur = np.ones((K, K)) / (K * K) # equal weights, sum to 1
# Convolution by nested loops (valid output: image - kernel + 1)
out_size = SIZE - K + 1
out = np.zeros((out_size, out_size))
for y in range(out_size):
for x in range(out_size):
region = canvas[y:y + K, x:x + K]
out[y, x] = np.sum(region * blur)
Image.fromarray(out.astype(np.uint8), 'L').save('simple_convolution.png')
Core concepts
Concept 1 — Convolution in three steps
For a kernel K of size k × k and an input image I, the discrete 2D convolution at output position (y, x) sums the element-wise product over the k × k window:
O[y, x] = Σ_i Σ_j I[y + i, x + j] · K[i, j] for i, j in 0..k-1Three steps per output pixel:
- Position — pick the
k × kregion of the input centred on (or anchored at) the output pixel. - Multiply — element-wise multiply that region by the kernel.
- Sum — add up the products. The total is the value of the output pixel [1].
Each output pixel is a single weighted average of its neighbourhood. The kernel’s weights are what the weighting is.
Concept 2 — Four canonical 3×3 kernels
Read the weights, predict the effect.
Identity — pass through.
identity = np.array([
[0, 0, 0],
[0, 1, 0],
[0, 0, 0],
])Only the centre pixel survives; every output equals its input. Useful as a sanity check.
Box blur — average.
blur = np.array([
[1, 1, 1],
[1, 1, 1],
[1, 1, 1],
]) / 9.0Equal weights, normalised to sum 1. Every output is the mean of the 3×3 neighbourhood. Sharp edges become 3-pixel ramps.
Sharpen — amplify the centre, subtract the neighbours.
sharpen = np.array([
[ 0, -1, 0],
[-1, 5, -1],
[ 0, -1, 0],
])Centre weighted 5; the four neighbours weighted -1. In a uniform region the negatives cancel 4 × (-1) × value + 5 × value = value — the picture passes through. At an edge, the negatives subtract less than they could, so the centre wins and the edge gets emphasised.
Edge detection — opposite sign on centre vs surround.
edge = np.array([
[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1],
])Sum is zero; constant regions go to zero. Only places where the centre differs from its neighbours produce non-zero output — the edges [2].
Concept 3 — Padding to keep output size
A naive convolution shrinks the output by kernel_size - 1 in each dimension — there’s no valid neighbourhood for output pixels near the edge. To keep the output the same size, pad the input with pad = kernel_size // 2 rows/columns of extra pixels before the loop:
pad = K // 2
padded = np.pad(image, pad, mode='edge') # copy edge values outward
out = np.zeros_like(image, dtype=np.float64)
for y in range(image.shape[0]):
for x in range(image.shape[1]):
region = padded[y:y + K, x:x + K]
out[y, x] = np.sum(region * kernel)Three padding modes, all reasonable:
mode='constant'(zero pad) — fills the border with zeros. Cheap; introduces dark fringe artefacts because the kernel “sees” black.mode='edge'— repeats the outermost row/column outward. The default in this module: preserves edge brightness, no artificial values.mode='reflect'— mirrors the image at the boundary. Smoothest visual continuation, slightly more expensive.
After convolution with a zero-sum kernel (sharpen, edge-detect), the output can go negative or exceed 255. Two recovery options:
clipped = np.clip(out, 0, 255) # fast
normalised = (out - out.min()) / (out.max() - out.min()) * 255 # full dynamic rangeUse clipping when you only care about strong responses; normalise when you want every edge visible, including weak ones [1].
Exercises
Three exercises in Execute → Modify → Create order: run a 4-kernel comparison, swap kernels, then write your own convolve function with edge padding.
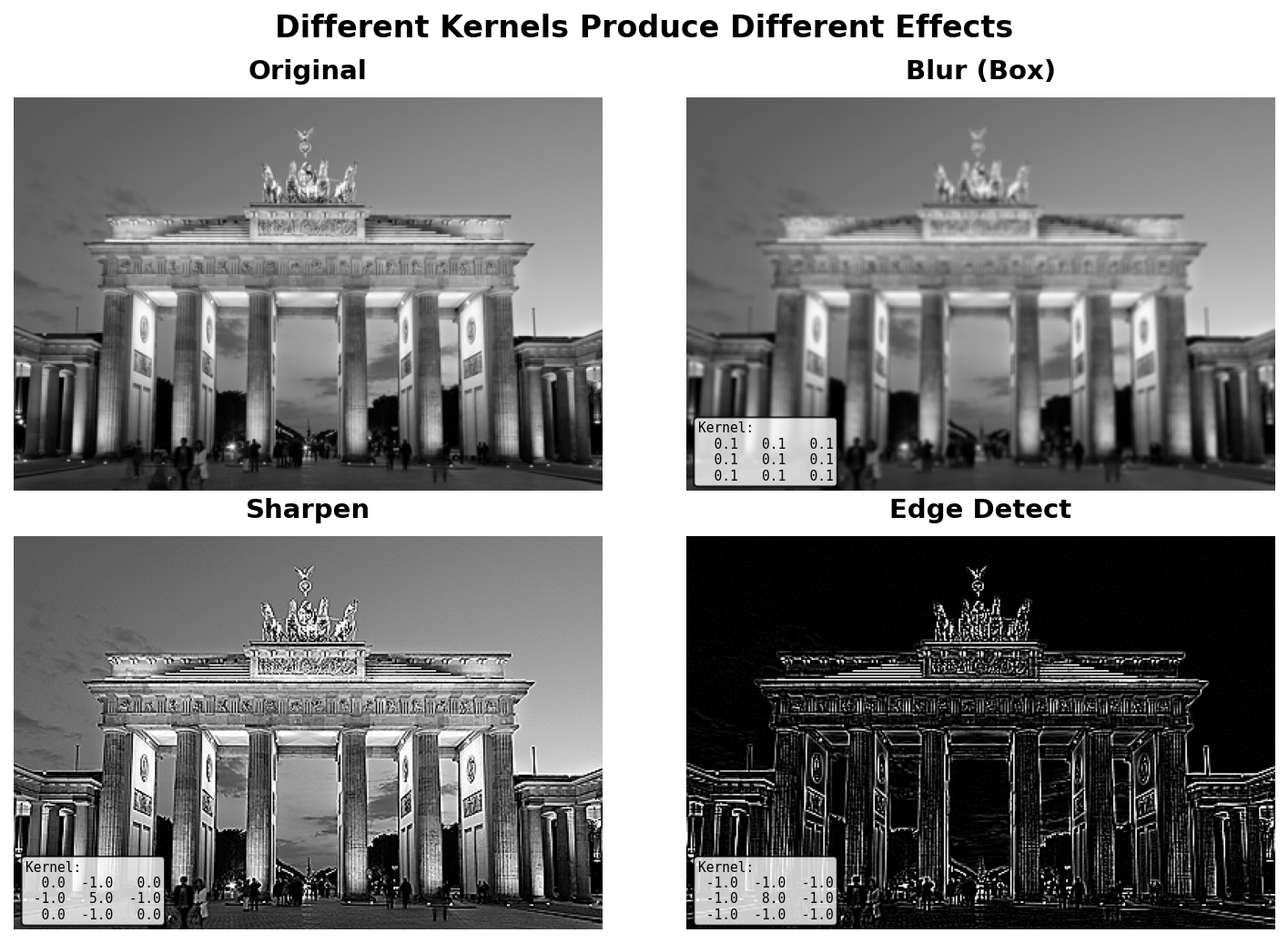
Compare four kernels on the same photo
Run exercise1_execute.py from the downloads. It applies identity, blur, sharpen, and edge-detect to the Brandenburg Gate photograph and lays them out in a 2×2 grid.
Reflection questions
- Why does the identity kernel return the same image when its centre is
1and everything else is0? - The edge-detection output is mostly black. Why?
- What would happen if you applied the blur kernel ten times in a row?
Answers
Identity — at every position, the convolution is 1 × centre_pixel + 0 × everything_else = centre_pixel. Each output equals its input.
Edges black — the edge-detection kernel sums to zero. In any constant region (the sky, the smooth parts of the columns), the sum is 8 × value + 8 × (-value) = 0. Only pixels at intensity transitions produce non-zero output, which is exactly where edges live.
Ten blurs — successive box blurs approximate a Gaussian blur, with the standard deviation growing as √n × σ_single. Ten 3×3 blurs is roughly equivalent to one Gaussian with σ ≈ √10 ≈ 3.2 pixels. The picture progressively dissolves into broad colour fields.
Three kernel edits
Edit exercise2_modify.py so it applies these three modifications to the same input.
Goals
- Diagonal edge detection — a kernel that responds to top-left → bottom-right edges only.
- Stronger sharpen — increase the centre weight from
5to9and offset with-2neighbours. - 5×5 box blur — replace the 3×3 average with a 5×5 average.
Goal 1 — what to expect
diag = np.array([
[-1, -1, 0],
[-1, 0, 1],
[ 0, 1, 1],
])This is the diagonal Sobel-like operator. Diagonal edges going from top-left to bottom-right produce a positive response; other orientations produce less response. The output highlights diagonally-running boundaries.
Goal 2 — what to expect
stronger = np.array([
[ 0, -2, 0],
[-2, 9, -2],
[ 0, -2, 0],
])9 + 4 × (-2) = 1, so the kernel still sums to 1 — uniform regions are unchanged, but edges are doubled in contrast vs the original sharpen. Expect a much crunchier output.
Goal 3 — what to expect
K = 5
blur = np.ones((K, K)) / (K * K)A larger neighbourhood means each output is the mean of 25 pixels instead of 9 — softer blur, wider edge ramps. The image looks roughly twice as out-of-focus.
Same-size convolution with edge padding
Build a small convolve(image, kernel) function that pads the input with np.pad(..., mode='edge') so the output has exactly the same shape as the input. Apply it to the Brandenburg photo with a Gaussian-style kernel.
import numpy as np
from PIL import Image
def convolve(image, kernel):
"""Same-size 2D convolution with edge-replicate padding."""
H, W = image.shape
K = kernel.shape[0] # assume square kernel
pad = K // 2
# TODO 1: pad the image with mode='edge'.
# TODO 2: allocate the output array.
# TODO 3: nested loop over (y, x); accumulate the weighted sum.
return output
# A 5×5 Gaussian-like kernel (Pascal's triangle outer product)
g = np.array([1, 4, 6, 4, 1])
gauss = np.outer(g, g) / np.sum(np.outer(g, g))
photo = np.array(Image.open('bbtor.jpg').convert('L'), dtype=np.float64)
blurred = convolve(photo, gauss)
Image.fromarray(np.clip(blurred, 0, 255).astype(np.uint8), 'L').save('gauss_blur.png')Hint 1 — padding
padded = np.pad(image, pad, mode='edge')The output of np.pad has shape (H + 2*pad, W + 2*pad). Indexing padded[y:y+K, x:x+K] will always be valid for y in range(H) and x in range(W).
Hint 2 — output shape and loop
output = np.zeros((H, W), dtype=np.float64)
for y in range(H):
for x in range(W):
output[y, x] = np.sum(padded[y:y + K, x:x + K] * kernel)Note the loop is over the unpadded size; the padding is implicit in the index window.
Complete solution
import numpy as np
from PIL import Image
def convolve(image, kernel):
H, W = image.shape
K = kernel.shape[0]
pad = K // 2
padded = np.pad(image, pad, mode='edge')
output = np.zeros((H, W), dtype=np.float64)
for y in range(H):
for x in range(W):
output[y, x] = np.sum(padded[y:y + K, x:x + K] * kernel)
return output
# Pascal-triangle Gaussian-style 5×5
g = np.array([1, 4, 6, 4, 1])
gauss = np.outer(g, g)
gauss = gauss / gauss.sum()
photo = np.array(Image.open('bbtor.jpg').convert('L'), dtype=np.float64)
blurred = convolve(photo, gauss)
Image.fromarray(np.clip(blurred, 0, 255).astype(np.uint8), 'L').save('gauss_blur.png')
How it works:
np.pad(image, pad, mode='edge')adds apad-wide ring around the input by copying the border row/column outward.- The loop indexes the padded image with offsets
y..y+K(always valid by construction). - Output shape matches the input because we loop over the original
H × Wrange. - The Gaussian-like kernel is the outer product of two Pascal’s-triangle rows; it sums to 1 after normalisation, so brightness is preserved.
Make it your own
- Replace
np.sum(padded[y:y+K, x:x+K] * kernel)with(padded[y:y+K, x:x+K] * kernel).sum()and watch the timing — they are nearly identical, butscipy.signal.convolve2dis 50–100× faster than either Python loop. - Apply the same convolve function to each colour channel of an RGB image and stack the three outputs.
- Combine a sharpen and a blur: convolve with the sharpen first, then convolve again with the blur. The result is unsharp masking — the standard technique for softening over-sharpened images.
Downloads
simple_convolution.py — quick-start box blur exercise1_execute.py — four-kernel comparison exercise2_modify.py — kernel modification starter exercise3_create.py — Exercise 3 starter convolution_solution.py — same-size reference bbtor.jpg — input photoSummary
Common pitfalls to avoid
- Working in
uint8instead offloat64— multiplications overflow at 256 and the output is garbage. Cast tofloat64first. - Forgetting to normalise a blur kernel — without
/ K², the output overshoots by a factor of K² and saturates to white. - Indexing the padded image with the original coordinates — off by
pad. Loop overrange(H)and indexpadded[y:y+K]. - Mixing up
np.sum(a * b)andnp.dot(a.ravel(), b.ravel())— equivalent for matching shapes, but the dot product surprises beginners with shape errors. - Reusing kernels across
uint8andfloat64images — make sure the dtype is consistent end-to-end.
References
- [1] Gonzalez, R. C., & Woods, R. E. (2018). Digital Image Processing (4th ed.). Pearson.
- [2] Marr, D., & Hildreth, E. (1980). Theory of edge detection. Proceedings of the Royal Society of London. Series B, 207(1167), 187–217. doi:10.1098/rspb.1980.0020
- [3] LeCun, Y., Bottou, L., Bengio, Y., & Haffner, P. (1998). Gradient-based learning applied to document recognition. Proceedings of the IEEE, 86(11), 2278–2324. doi:10.1109/5.726791
- [4] Szeliski, R. (2022). Computer Vision: Algorithms and Applications (2nd ed.). Springer.
- [5] NumPy Community. (2024). numpy.pad. NumPy Documentation. numpy.org/pad
- [6] SciPy Community. (2024). scipy.signal.convolve2d. SciPy Documentation. docs.scipy.org